几乎所有的嵌入式设备都依赖异步事件的能力来完成系统的工作。
本文介绍ARM Cortex-m设备的异常模型。
ARM 异常模型概述
异常的定义:改变程序正常控制流程的一种条件。
中断和异常的差异:“中断”是用来描述“异常”的。异常由以下几个部分组成:
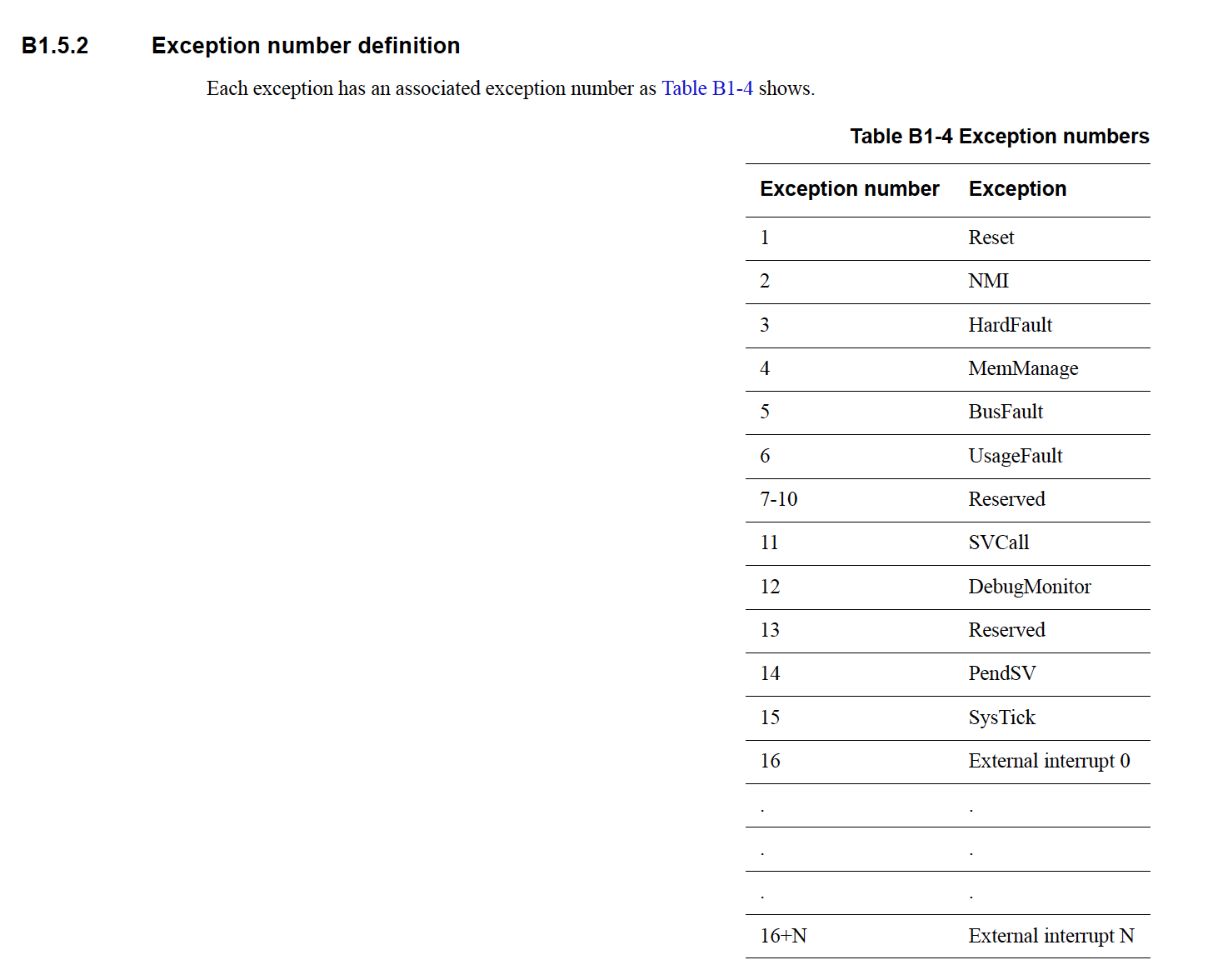
Exception Number 异常编号
异常编号是用来唯一指示一个特定异常的数字(从1开始)。这个数字也作为中断向量表的索引,用来定位一个异常处理函数(Exception handler),通常也称为中断服务程序(Interrupt Service Routine)。当异常触发的时候,ARM硬件会自动查找中断向量表并开始执行相应的代码。
Priority Level 中断优先级
每个异常都有它自己的优先级。大多数异常的优先级是可以配置的。数字越小,优先级越高。
如果两个异常由相同的优先级,那么,Exception Number 异常编号小的先执行。
Synchronous or Asynchronous 同步或异步
SVCall 这类的异常,是同步异常,相应的指令执行后会立刻触发异常。其他的叫做异步异常。
异常可以处于下面几种状态中的一种:
Pending
MCU检测到异常但是还没有开始执行异常处理函数
Active
开始执行异常处理函数,但是还没有结束。这种情况下可以被更高优先级的中断抢占
Pending & Active
只在异步异常的时候发生。一般是正在处理异常时,再次触发了相同的异常
Inactive
既不是pending也不是active
即使中断被禁用了,它还是可以变成 pending 状态的。一旦使能它,就会变成 active。因此,在使能中断的时候,最好先清除pending。
内置异常
Cortex-M 保留 1-15 异常编号,这些异常被称为内置异常。
异常编号同样是中断向量表的偏移。向量表的0号索引保存的是 msp 的复位值。剩余的1到15号,保存的是异常处理函数的指针。
这六个异常默认是都支持的:
- Reset - 复位
- NMI - 不可屏蔽中断,如果在异常处理函数中再发生错误,就会触发NMI异常
- HardFault - 各种可能的系统故障的统括,包括内存非法访问、处理错误和非对齐访问等
- SVCall - 当执行svc指令时触发的异常
- PendSV & SysTick - 软件触发的系统层级的中断。RTOS系统常用它来管理系统调度和上下文切换
外部中断
如DMA,GPIO等核外中断被称为外部中断。它们都是通过 Nested Vectored Interrupt Controller (NVIC) 来管理的。
异常相关中断寄存器
异常是通过 System Control Space (SCS) 的一组寄存器来进行配置的。
Interrupt Control and State Register (ICSR) - 0xE000ED04
中断控制和状态寄存器
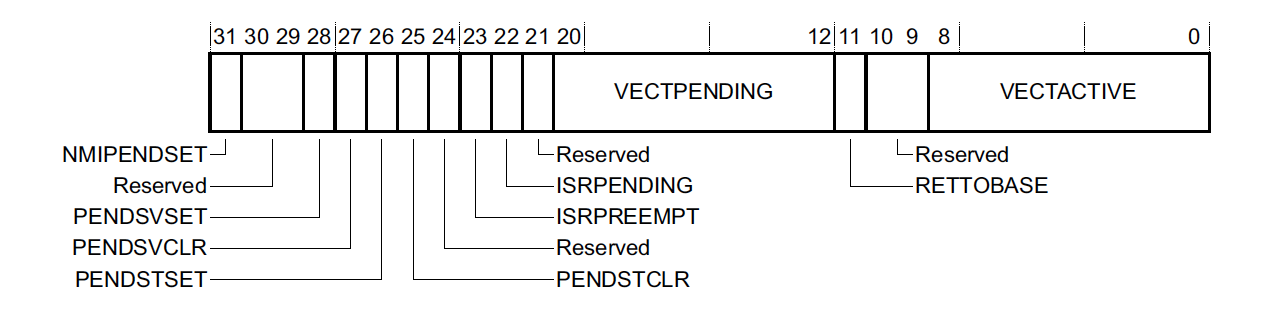
该寄存器控制NMI、PendSV和SysTick异常,并且指示系统当前中断的状态。
其中,
- VECTACTIVE - 当前正在运行的中断异常编号(没有时是0)。这个值同样保存在xPSR的IPSR位。
- RETTOBASE - 如果为0,表示除了当前执行的中断外,还有另外的中断是active的。
- VECTPENDING - 未完成的 pending 中断中级别最高(值最小)的异常编号。
Application Interrupt and Reset Control Register (AIRCR) - 0xE000ED0C
应用中断和复位控制寄存器
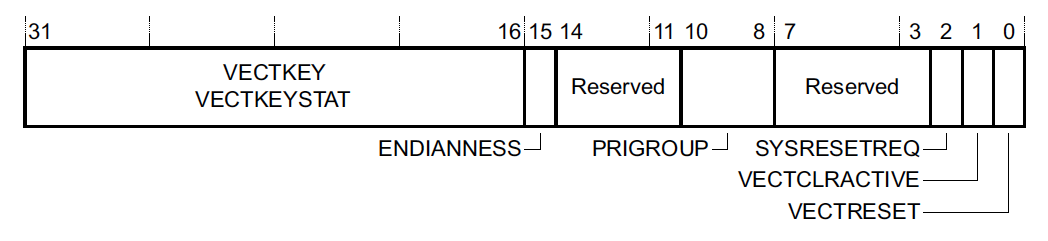
其中,
- SYSRESETREQ - 写1将触发系统复位
- PRIGROUP - 优先级组。该字段允许我们将异常优先级分为两部分(组优先级和子优先级)。这个值表示的是子优先级由多少位组成。组优先级用来控制哪些中断可以互相抢占。子优先级控制处理同一组中异常的顺序。(不同组可抢占,同组的没有抢占只有先后)
要写这个寄存器,必须将VECTKEY字段设置为0x05FA。
System Handler Priority Register (SHPR1-SHPR3) - 0xE000ED18 - 0xE000ED20
系统处理程序(Built in)优先级寄存器
8个字节为一组。之所以从1开始,是因为最开始的异常编号是不可以配置的(Reset,NMI,HardFault)。
编号4~7对应的是SHPR1寄存器,以此类推。
默认这些系统异常的优先级都是0,也就是最高优先级。一般是不需要配置的。
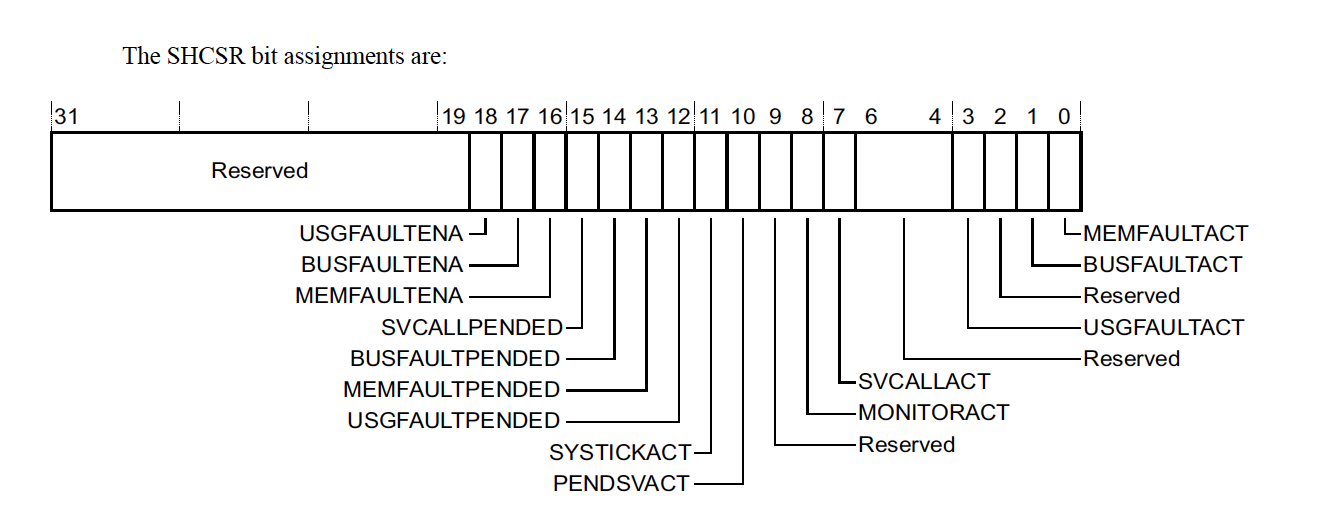
System Handler Control and State Register (SHCSR) - 0xE000ED24
系统处理函数控制和状态寄存器
该寄存器用来指示系统(内置)异常的状态,或者使能(激活)系统异常。
Interrupt Controller Type Register (ICTR) - 0xE000E004
中断控制类型寄存器
该寄存器允许我们决定支持多少外部中断。Cortex-M系列最多是496。
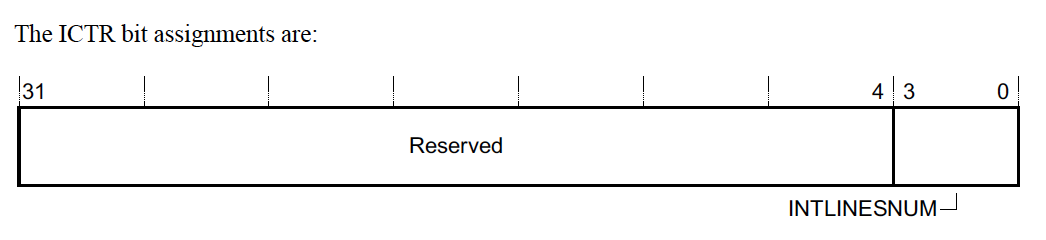
支持的中断数为:32 * (INTLINESNUM + 1)
NVIC Registers
NVIC有一组用来配置外部中断的寄存器。
外部中断是从16开始的,因此外部中断N的异常编号是 16 + N。
Interrupt Set-Enable (NVIC_ISER) and Clear-Enable (NVIC_ICER) Registers
中断使能和清除寄存器
NVIC_ISER0-NVIC_ISER15:0xE000E100-0xE000E13CNVIC_ICER0-NVIC_ICER15:0xE000E180-0xE000E1BC
写1到对应的bit,可以使能和清除对应的中断。如果中断已经使能,那么读回来的值是1。
Interrupt Set-Pending (NVIC_ISPR) and Clear-Pending (NVIC_ICPR) Registers
中断pending使能和清除寄存器
NVIC_ISPR0-NVIC_ISPR15:0xE000E200-0xE000E23CNVIC_ICPR0-NVIC_ICPR15:0xE000E280-0xE000E2BC
写1可以设置或清除中断的pending状态。
Interrupt Active Bit Registers (NVIC_IABR)
中断激活位寄存器
NVIC_IABR0-NVIC_IABR15:0xE000E300-0xE000E33C
只读的,如果中断已经激活,那么读回来的值是1。
Interrupt Priority Registers (NVIC_IPR)
中断优先级寄存器
NVIC_IPR0-NVIC_IPR123:0xE000E400-0xE000E5EC
设置中断的优先级。每个中断8位。只允许配置为4~256。
它是用的高位,如,只用了2 bits 时,它的有效值为:
0b000.0000 (0x0), 0b0100.0000 (0x40), 0b1000.0000 (0x80) and 0b1100.0000 (0xC0).
Software Triggered Interrupt Register (STIR) - 0xE000EF00
软件触发中断寄存器
跟设置NVIC_ISPR是一样的。
这里设置到寄存器的值为 外部中断号(中断编号 - 16),而不是按 bit 设置的。
高级异常主题
异常进入与退出
异常发生时,会自动保存一些寄存器(caller-save)。至少保存8个寄存器:x0, x1, x2, x3, x12, lr, pc, xpsr。如果使能了FPU,可能还会保存 17个FPU寄存器。
异常退出时,会自动出栈这些 caller-save 的寄存器。
Tail-Chaining 尾链
退出异常的时候,硬件需要自动pop和restore最少8个caller-save的寄存器。
但如果退出ISR的时候,新的异常已经pended了,那么就可以不需要pop和push这些寄存器,因为pop和push的是完全相同的寄存器。这个优化叫做 “Tail-Chaining(尾链)”。
这个优化可以提升我们中断响应的速度。
Late-arriving Preemption 迟到抢占
ARM核可以在中断进入阶段(保存寄存器和取出ISR例程执行)检测更高优先级的中断。
这种情况下,高优先级的ISR可以直接执行,而不再做已经做过的寄存器保存动作。这个优化可以提高高优先级中断响应的速度。
高优先级中断执行完之后,可以直接 tail-chain 到之前的异常来执行。
Lazy State Preservation 延迟状态保存
ARMv7 和 ARMv8 设备可选地支持FPU。
支持FPU需要额外增加33个寄存器(s0-s31 & fpscr)。其中17个是 caller-save 的。
如果每次发生异常都自动保存这17个寄存器,会带来额外的开销。
一般ISR中是很少用到FPU的。因此,一种优化是在ISR中检测到FPU指令的时候,才保存这些FPU寄存器,这个优化叫做 “lazy context save”。
执行优先级和优先级提升
执行优先级:当没有异常激活时,当前系统的执行优先级可以被认为是 “最大可配置优先级” + 1。这意味着,任何异常发生,都将会打断当前的流程。
软件上有几种可以修改“执行优先级”的方法,使其高于线程模式的默认优先级或高于一些激活的异常来执行。这种操作叫做”优先级提升“。在RTOS上经常用来处理一些不能被中断打断的代码,如上下文切换。
优先级提升的方法:
- PRIMASK:对应CMSIS的
__disable_irq()和__enable_irq(),或者cpsid i和cpsie i。这会禁用所有可配置优先级的异常。(只有 NMI,HardFault 和 Reset 可以触发) - FAULTMASK:对应CMSIS的
__disable_fault_irq()和__enable_fault_irq(),或者cpsid f和cpsie f。这会禁用所有除了 NMI 以外的异常。 - BASEPRI:CMSIS
__set_BASEPRI()。屏蔽低于特定优先级的异常。
可中断执行的指令
很多ARM的指令是原子执行的。例如32位的内存访问就是一个原子操作。
然而为了降低中断延迟,在异常发生时,一些多周期的指令会被丢弃,并在异常处理结束之后重新执行。如除法指令(udiv 和 sdiv)和双字加载/保存指令(ldrd & strd)。
另外,一些指令是“可中断-继续”的,也就是说这些指令可以被中断打断,中断结束后继续执行。如多寄存器的加载/保存指令(ldm和stm)。
最好不要对重复读写会出问题的内存使用 ldm 和 stm 指令,或者通过关部分中断来保护这些临界段的访问。
FreeRTOS中的中断和临界区
Systick 和 Pendsv
(1)什么是 PendSV?
PendSV(可悬起的系统调用),它是一种CPU系统级别的异常,它可以像普通外设中断一样被悬起,而不会像SVC服务那样,因为没有及时响应处理,而触发Fault。
要点是可以缓期执行。
(2)Systick 优先级高于外部中断可不可以?
可以,但有问题。如果外部中断的ISR执行过程中,Systick 打断外部中断处理函数的执行,那么 Systick 中做任务切换,尝试再中断活跃时企图回到线程状态。则会触发Fault。为了解决这个问题,早期的OS会检测是否有中断活跃,只有无任何中断时才响应 Systick 中断。
(3)Systick 优先级设置为最低可不可以?
可以。实际现在FreeRTOS也是把 Systick 和 PendSV 的优先级设置为最低。
但是呢,一般OS会在任务调度时,关闭中断,也就是进入临界区,而OS任务调度是比较耗时的,这会导致任务调度期间,无法快速响应外部IRQ。
(4)Systick 优先级调低,避免了触发 Fault 的问题,但是又会影响外部中断IRQ的处理速度。那如何处理呢?
使用 PendSV。1. Systick 制作调度前的判断工作,不做任务切换(降低延时);2. 触发 PendSV。如果此时有外部IRQ请求,则先处理外部IRQ,最后再执行PendSV做任务调度。
(5)能不能把Systick设置成最高优先级,PendSV设置成最低优先级?
也会有问题。因为Systick的优先级最高,而且又是周期性地触发,因此会经常抢占外部IRQ,这就导致外部IRQ变慢。
小结:
- 因此在实际项目中,我们把 Systick 和 PendSV 都设置成最低优先级。外部中断的优先级是比 Sytick 和 PendSV 都高的。
1 | // 定义成最低优先级 |
临界区保护
- taskENTER_CRITICAL() 和 taskEXIT_CRITICAL()
这是通过设置BASEPRI来屏蔽部分中断来达到临界区的目的,它屏蔽的中断为 configMAX_SYSCALL_INTERRUPT_PRIORITY,优先级低于该值(数值大)的中断都被屏蔽。另外它是带计数的。
1 |
|
- taskENTER_CRITICAL_FROM_ISR()和taskEXIT_CRITICAL_FROM_ISR()
可以在中断中调用,且这个中断的优先级一定要低于configMAX_SYSCALL_INTERRUPT_PRIORITY
1 |
|
它通过记录并恢复之前的BASEPRI返回值,来达到支持嵌套调用的目的。
- vTaskSuspendAllvTaskSuspendAll() 和 xTaskResumeAllxTaskResumeAll()
单纯关调度器,不能屏蔽中断。
补充问题
- vPortEnterCritical() 能不能屏蔽外部中断?
答案是取决于我们项目的配置。如果我们设置 configMAX_SYSCALL_INTERRUPT_PRIORITY 为 4<<5 也就是128,那么只能屏蔽低于 IRQ_PRIORITY_ABOVENORMAL 级别的中断(同级别的IRQ_PRIORITY_ABOVENORMAL级别的中断只会有先后,没有抢占)。一般如 GPIO 等使用IRQ_PRIORITY_NORMAL 之类的中断,还是可以屏蔽的。
FreeRTOS 中 configMAX_SYSCALL_INTERRUPT_PRIORITY 的默认值是16,这种情况下几乎所有外部中断都可以屏蔽(因为 1<< 5 = 32,就已经比16要大了)。
1 | // 我们使用最高的3 bits 来描述中断优先级。 |
- 为什么不允许优先级高于configMAX_SYSCALL_INTERRUPT_PRIORITY的中断调用FreeRTOS的API?
优先级高于configMAX_SYSCALL_INTERRUPT_PRIORITY的中断,FreeRTOS的临界区是保护不了的。因此就会存在竞态问题。
- 为什么中断中一定要调用_FROM_ISR的API?
这两组API的主要区别是,普通API里面会直接yield,但是_FROM_ISR的API是返回是否需要yield,然后再调用portYIELD_FROM_ISR(pxHigherPriorityTaskWoken)根据情况yield。
有的硬件对中断中切换上下文是有不同实现要求的,如有的只能在中断最后yield。所以要求中断中统一使用_FROM_ISR的API。
另外,在我们项目中,这两个yield其实是一样的,没有什么区别。portYIELD_FROM_ISR 也是触发PendSV中断,而PendSV中断是最低优先级,也得等到当前中断执行结束之后才进入PendSV中断执行任务切换。
参考资料:
- https://interrupt.memfault.com/blog/arm-cortex-m-exceptions-and-nvic
- Cortex -M4 Devices Generic User Guide